
MIT Motorsports is an engineering project team at MIT that designs and builds an electric racecar from scratch every year for the Formula SAE Electric Competition. It’s a fast-paced and rigorous extracurricular activity meant to help MIT students apply theoretical classroom learnings to a real-life engineering project.
I was in MIT Motorsports for three consecutive years starting 2020 (my first year at MIT). From 2021-2022, I was the Anti-Roll Bar (ARB) and Rocker Subsystem Lead and was in charge of their design and execution for MY22’s (“Racecar Model Year 2022”). From 2022-2023, I joined the team’s Executive Board as Mechanical Lead and was in charge of the high-level operations of running the team and building / preparing MY23 racecar for the 2023 Formula Hybrid + Electric and Formula SAE competition.
ARBs and Rockers Subsystem Lead
August 2021 – June 2022
The ARBs and Rockers are both integral suspension components that help control the racecar’s roll and ride rate. As the subsystem lead, I was responsible for the entire process of researching, designing, manufacturing, and assembling MY22’s Rockers and ARBs. I was in frequent communication with the suspension lead to ensure my design requirements and calculations for spring stiffnesses and motion ratios aligned with the car’s suspension parameters.
CAD / Manufacturing
I used a top-down modeling approach in NX for designing the subsystem. In tangent to coordinating with the suspension and frame lead to satisfy packaging constraints, I used NX Motion Analysis to fine-tune the motion ratios.
Once the designs were finalized I created a manufacturing plan for the Rockers subsystem first. Because of their clam-shell design, I used both the waterjet and 3 axis CNC machine to manufacture them.
Because the Rockers’ motion ratio heavily depended on their mounting positions, I designed and manufactured a custom jig for welding their mounting tabs onto the chassis. I wanted to ensure that the Control Arms mounting and Rocker / ARBs mounting were accurate with respect to each
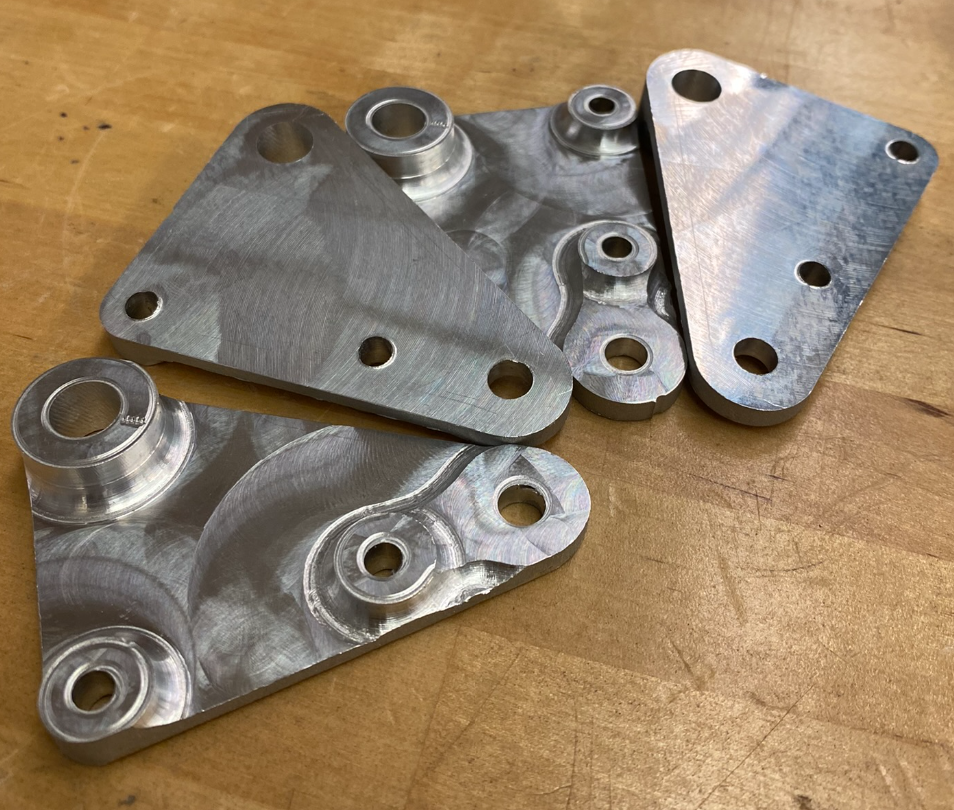
other and that the distance between shocks and rockers within the Rocker assembly were accurate. These were the two factors that heavily impacted the motion ratio of the system.
I used the same reference point as the Control Arms tab jig to minimize the tolerance stack-up between the two systems and ignore other potential misalignments like the jigging of the frame tubes. I determined tolerance specifications by geometrically calculating how much play was provided by the ball bearings in the rod ends and damper pivot points. What made the final assembly significantly more challenging though was the fact that the Rocker
tabs were not on planes parallel to any axis: they were both a couple of degrees offset from the Z-X and X-Y plane. Because of this, the jig could no longer be a machined 2D plate, rather it needed to have a 3D contour.
FEA
In my initial hand calculations, I assumed the frame was entirely rigid and not affected by forces in my system. However, I realized that this was not the case as 1) the frame is not rigid and 2) the system’s mounting points were not triangulated at nodes of frame tubes. Thus, further considerations needed to be made of the bending stresses in those frame tubes.
I conducted FEA in NX Nastran. To simplify my model, I converted the tubes and tabs to a 2D mesh and stitched the meshes together to model the welds. I then modeled the fasteners as rigid connections and the rockers and shocks themselves as rigid bodies to analyze how the frame tubes will react under peak bump loads. In my initial model, I only included the two frame tubes with tabs and fixed their ends (where they connect to nodes). The maximum bending stress exceeded the material strength in this model and so overtime, I refined it to include the nodes of frame tubes, and also the suspension tabs and their forces. In the end, we needed to double the thickness of the frame tube to prevent it from bending and breaking.
Learnings
The Rockers system was successfully assembled on MY22 in time for the June 2022 FSAE Competition. Unfortunately, my resources were reallocated to finishing other aspects of the car so the manufacturing of the Anti-Roll Bar system was postponed to the year after. Overall, it was a great learning experience going through the entire process of designing to manufacturing and assembly. I found that communication was key to a successful system integration on MY22, especially since the Rockers affected the suspension system, chassis, and even the body panels mounting. Looking back, there are many things I would change in my initial design to optimize the manufacturing and assembly process, like having the rocker mounting points parallel to a plane to decrease jigging complexity, making the shape of the rockers common angles to use v clamps instead of custom machined soft jaws, minimizing the contact area between the tab and rocker faces to decrease the friction between them, etc.
MY23 Mechanical Lead
June 2022 – June 2023
Entering Competition Year 2023, I joined the team’s Executive Board as Mechanical Lead. I was responsible for creating and upholding a team timeline, communicating with the other Executive members, facilitating subsystem integration, managing team members, and preparing for competition. Over the course of the year, I streamlined the new member onboarding program and increased the team’s size by 171%, enforced procedures to improve documentation of design / build mistakes by 80%, and led the team to successfully pass Mechanical Inspection and compete in a dynamic event at competition for the first time since 2020 (when our team was impacted by Covid).
Project Management
As Mechanical Lead, I oversaw the development of the chassis, suspension, battery, powertrain, wheel packages, electrical boxes, ergonomics, and mechanical safety systems of the racecar. While MY23 was a continuation of the design cycle of MY22, there were still a lot to be done in terms of finalizing the design, manufacturing, and testing.
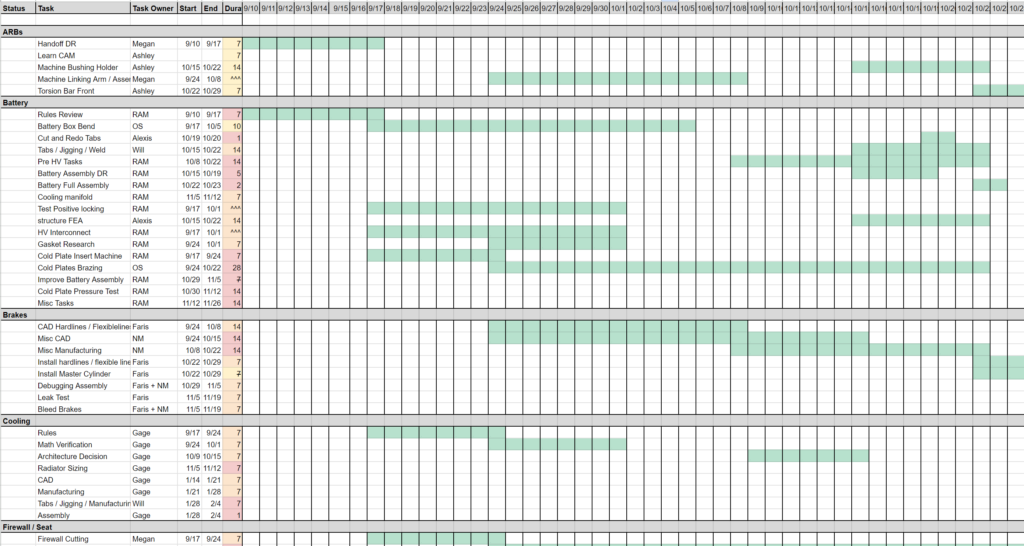
I used a top-down approach to creating a team timeline, first starting with the main subsystems (e.g. battery, suspension, etc.). Then, I considered all their components and listed out all the tasks needed to be done for each. I estimated how long each task would take and organized their start dates by what could be done in parallel or had to be done in series. This led me to the team’s final Gantt chart.
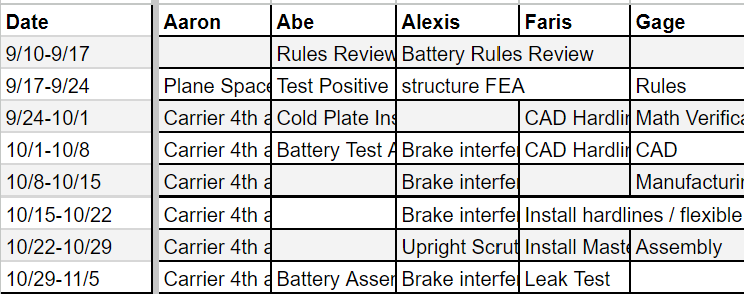
I confirmed the resource feasibility of the timeline by creating a separate chart of working dates vs individuals to ensure a person was not being overworked (had multiple tasks during a single timespan) or underworked (had prolonged timespans of inactivity). I also used this chart to transparently convey work expectations to my members and, if needed, make changes to their allocated tasks to accommodate any time conflict (e.g. study / exam dates, vacations, etc.). Through weekly 1:1s with all my members, I consistently updated the team’s timeline and task allocations to effectively meet the team’s goals.
New Member Onboarding Program
In typical years, the Recruitment Lead organizes a project (separate from racecar tasks) for all new members to do in the fall to get familiar with the team’s internal logistics, CAD standards, and learn basic machining processes. However, this year, I decided to center the new member’s projects around tasks for the racecar. This was because 1) we were continuing the design cycle of MY22 and had a lot of manufacturing tasks and 2) there were not enough older members to complete all the tasks. Besides this, I also believed that it would help increase the retention rate of new members giving them a project that directly contributed to the racecar.
I chose tasks that were simple in scope and divided them into two subgroups: designing and manufacturing. I then grouped new members into teams of 4-5 depending on their interests and assigned tasks accordingly. Throughout the semester, to maintain each team’s engagement, I met with each of them weekly to discuss their progress and give technical / personal guidance. Of course, as with any recruitment season in an extracurricular group, many new members dropped the team. After this, I was able to officially assign new members to subsystems and have individual weekly meetings with them to provide more detailed guidance on more technically challenging tasks.
At the end of the year, the team had a total of 12 committed new members (a 171% increase in retention compared to 2022 and 400% increase compared to 2021) leading to a total team increase of 171%.
High Voltage Battery
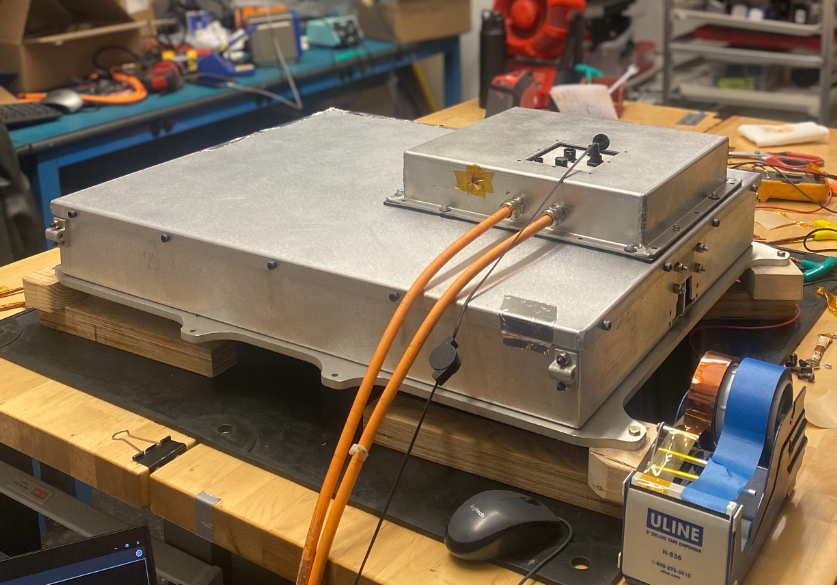
As the Mechanical Lead, I also oversaw the execution of MY23’s 400V Custom Battery. I haven’t had any prior experience working with high voltage components, so it was an undertaking figuring out logistically how we were going to complete the battery. The design was mostly finished and we needed to manufacture the enclosure, assemble the modules, figure out insulation, manufacture/test our custom cold-plates for water-cooling, organize the high voltage electronics, and assemble/test everything together. Safety was our top priority and so to gain more insight on battery safety we reached out to alumni who had experience working with high voltage systems.
Using their advice, we created an extremely detailed set of procedures including both general high voltage safety practices and procedures specific to our battery design including things to measure, what not to touch, an order of assembly operations, etc. Over the course of the year, as we’ve fine-tuned our safety practices and resolved various mechanical and electrical issues related to the battery, I’ve learned a lot of information regarding battery safety, design, and manufacturing that has helped me guide the battery team to successfully complete MY23’s 400V Battery.
Formula Hybrid + Electric / Formula SAE Competition
While we typically compete in the Formula SAE Competition, we also participated in the Formula Hybrid + Electric Competition for the first time in 2023. Because we didn’t compete in 2022, we wanted the Formula H+E competition to be a practice run for our team to get extra competition experience. Numerous challenges arose as we found out that the Formula H+E have a different set of rules than the FSAE Competition that variably affected different systems on the racecar. We adapted our timeline and redistributed our task forces to account for this accordingly. In addition, planning the competition was logistically very challenging as it was held during the school semester. We organized multiple cars to shuttle members from school in Massachusetts to the competition site in New Hampshire in addition to having some members stay at an Airbnb. Our biggest challenge came when during mechanical tech inspection, we found that our headrest tube thickness was too small. With little time to spare we decided to cut out the tube and replace it with a thicker one (a solution that seemed significantly less dubious than just adding gussets). In just a couple of hours we managed to find a steel tube of the right thickness in a nearby store, cut and grind out the old tube, setup welding tools in our pit area, cut and cope the new tube to fit in place, drive our welder from school, and weld the tube with time to continue mechanical inspection that day. We passed the inspection the morning of the next day. In the end, we passed all tech inspections and while we didn’t have time to compete in any dynamic events, participating in Formula H+E was integral to getting the team ready for the FSAE Competition.
While we still faced challenges during the FSAE Competition, it paled in comparison to the ones we faced during Formula H+E. Overall, we passed all tech inspections and competed in a dynamic event for the first time in two years! It was a great and exciting accomplishment for the team.
Final Notes
This three-year journey through MIT Motorsports has been an invaluable learning experience for me. As a freshman who barely knew how to CAD and had no manufacturing experience at all, I could not imagine myself in the end leading such a wonderful team of talented engineers and completing such a technically vigorous engineering project. Because of this experience I’ve learned how to apply engineering lessons from class in real-world applications and practice and improve upon my project management skills. I could see the effect my timelines and leadership have on the team and I’ve learned to continuously reflect and improve upon myself. I’ve learned the importance of organization, communication, and constant attention to detail that’s required of a high-functioning team working to build an electric racecar.




